Answer: 1
Yes, such motion is possible if the translation takes place along the axis of rotation. This type of motion is called screw motion.
Answer: 2
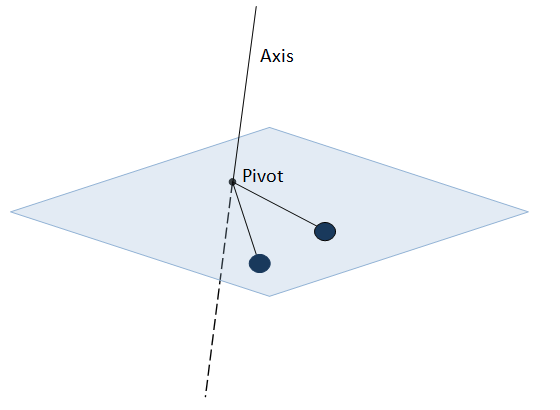
Yes, it is an example of pure rotation.
The axis of rotation passes through the pivot of the pendulum, perpendicular to the plane containing the pendulum.
Answer: 3
No, we cannot use componendo-dividendo theorem of proportion here. This is because α and a, and v and ω are dimensionally different. Therefore, v + ω and/or α + a are not possible.
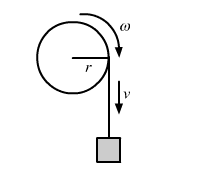
Answer: 4
Yes, there is an angular rotation of the ball about its centre.
Yes, angular velocity of the ball about its centre is same as the angular velocity of the ball about the fixed point.
Explanation:
Let the time period of angular rotation of the ball be T.
Therefore, we get:
Angular velocity of the ball about the fixed point = 2πT
After one revolution about the fixed centre is completed, the ball has come back to its original position. In this case, the point at which the ball meets with the string is again visible after one revolution. This means that it has undertaken one complete rotation about its centre.
The ball has taken one complete rotation about its centre. Therefore, we have:
Angular displacement of the ball = 2π
Time period = T
So, angular velocity is again 2πT. Thus, in both the cases, angular velocities are the same.
Answer: 5
No, we cannot see the other face of the Moon from the Earth.
Yes, a person on the Moon can see all the faces of the Earth.
Explanation: Angular velocity of the Moon about its own axis of rotation is same as its angular velocity of revolution about the Earth. This means that its rotation time period equals its revolution time period. So, we can see only one face of the Moon from the Earth.
However, angular velocity of the Earth about its axis is not same as the angular velocity of Moon about the Earth. So, all the faces of the Earth is visible from the Moon.
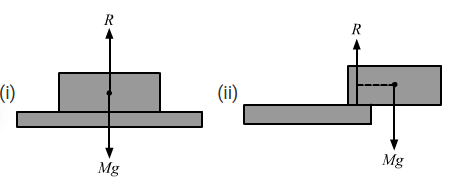
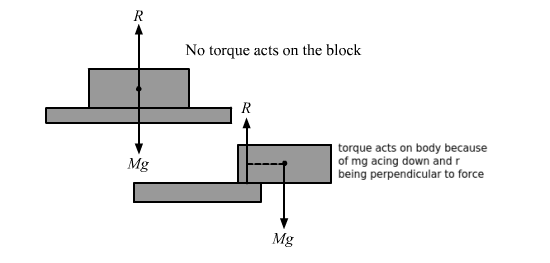
Answer: 6
No, its not always correct.
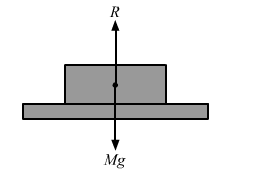
Figure 1
Explanation: If the centre of mass of the body is not on the same vertical line as the normal reaction R of the body, a net torque acts on the body about its vertical axis. In fig. 1, R and CM lies in the same vertical line. Thus, there is no torque about any vertical axis
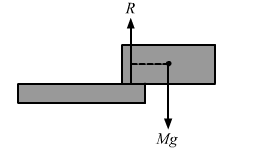
Figure 2
But in fig. 2, as R and CM do not lie along the same vertical line, there exists a torque about the vertical axis.
Answer: 7
No,→ r×→τ →Γ is not true.In fact, it is never true. This is because :→ r×→τ=→ r×(→ r×→F)
Applying vector triple product,
we get :→ r×(→ r×→F)=(→ r.→F)→ r−(→ r.→ r)→F
∵ → r.→ r=r2=(→ r.→F)→ r−r2→FIf → r.→F=0;
that is, →r⊥→F, then:→ r×→Γ=−r2→F
We know that r2 is never negative and → r×→Γ=−r2→.F
This implies that both vectors may be anti parallel to each other but not parallel.
Answer: 8
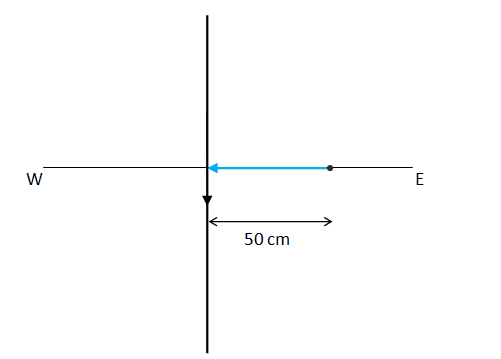
We know that:τ⃗ =r⃗ ×F⃗ Given:r⃗ =−0.5iˆ mF⃗ =−mgjˆThe torque becomes: τ⃗ =0.5(−iˆ)×mg(−jˆ) τ⃗ =0.5 mg kˆ [∵ iˆ×jˆ= kˆ ]No, there will be no angular acceleration on the particle due to the torque.Angular acceleration is given by α=τI. As the particle here moves in a straight line, the centre of rotation lies at a distance infinity (r=∞); so, moment of inertia (I = mr2) of the particle is infinity.
∴ α = 0
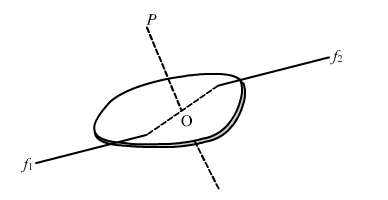
Answer: 9
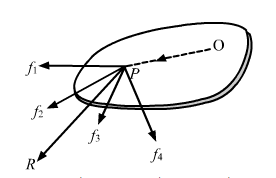
Let f1→ , f2 −→, f3→ ,… fn→ be the forces acting on a point P.Let O be the point along which torques (moments) will be taken.
Let : f1→ + f2 −→+ f3→ +…+ fn→=R⃗ …(1)Moments of force (torque) fi→ about O will be:τ1→=OP −→−×f1→
The sum of the torques about O will be : M⃗ = OP −→−×f1→+OP −→−×f2→+…+OP −→−×fn→⇒ M⃗ = OP −→−×(f1→+f2→+f3→ +…+fn→)⇒ M⃗ =OP −→−×R⃗ [From (1)]
Thus, we see that the torque of the resultant force R⃗ of the forces f1→ , f2 −→, f3→, …, fn−→− gives the sum of the moments of the torques.
Answer: 10
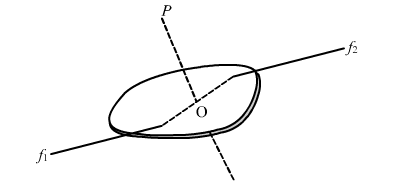
No, if the sum of all the forces acting on a body is zero, the body is not necessarily in equilibrium. To be in equilibrium, the sum of torque acting on the body must be zero too (see the fig.). In the above case, although the sum of the forces acting on the body is zero (F1−→+(−F1−→)=0). Still, the body will rotate along OP−→. So, it won’t remain in equilibrium.
Answer: 11
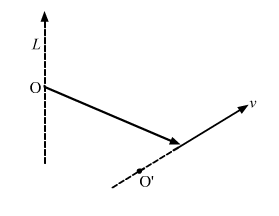
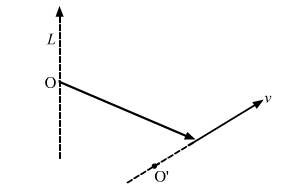
No, angular momentum is dependent on the position vector of the particle, angle between the radius vector and the linear velocity of the particle. So, there may be finite angular momentum along any different point even if it is zero at a particular point.If angular momentum is zero along O’ but finite along O.
Answer: 12
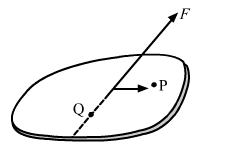
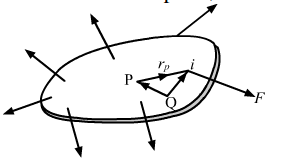
No, it is not necessary that the torque about any other point be zero if it is zero about one point.
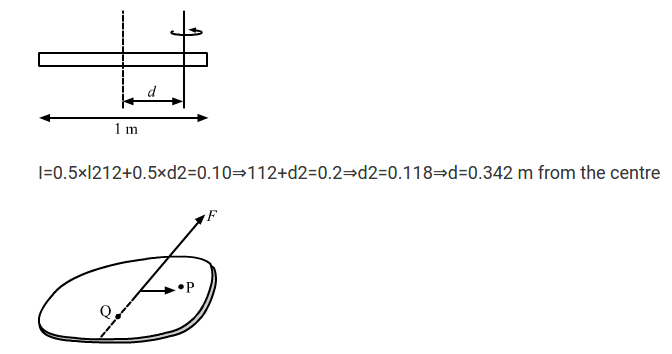
Let F −→be the resultant force due to all the forces acting on the plane of the body. Therefore, torque due to force F⃗ at any pointwill be the resultant torque. Now, we see that the torque due to F →at point Q will be zero because Q lies on the line of support of the force F but the torque due to force F⃗ will not be zero along the point P.
Answer: 13
Yes , if the torque due to forces in translation equillibriumis zero about a point, it will be zero about other point in the plane.
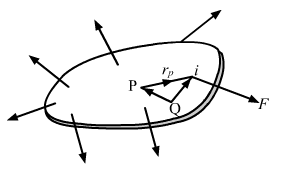
Let us consider a planner lamina of some mass, acted upon byforces F1−→, F2−→, … Fi→, etc.Let a force Fi→ act on aith particle and torque due to Fi→ be zeroat a point Q. Since the body is in translation equilibrium,
we have : ΣFi→=0 …(1)Again, torque about P is zero. Therefore, we have:Σ(rpi−→×Fi→)=0 …(2)
Now, torque about point Q will be: Σr⃗ Qi×Fi→=Σ(r⃗ QP+r⃗ Pi)×Fi→ [From fig. 13]=Σ(r⃗ QP×Fi→+rPi−→×Fi→)=ΣrQP−→−×Fi→+ΣrPi−→×Fi→=rQP−→−×ΣFi→+0 [From (2)]=rQP−→−×0 [From (1)]=0 Thus, F⃗ is zero about any other point Q.
Answer: 14
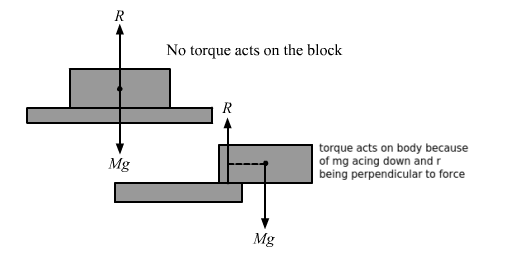
The centre of mass (CM) of a rectangular block lies in the middle of the block. When the block is projected less than half of its length (CM being over the table), no net force acts on it. Thus, no net torque acts upon the body. But if the block is projected more than half of its length outside the table (CM being outside the table), gravitational force acts along the CM of the block. This force produces a moment along the edge of the table. This rotates the block, and as a result, it falls down.
Answer: 15
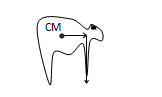
When the man tries to touch his toe, he exerts force along the hand downwards. This force produces amoment along the Centre of Mass (CM) of the man as shown in the figure. This moment makes him rotateand, thus, he falls down after losing the balance.
Answer: 16
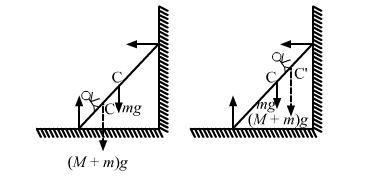
The ladder is more likely to slide when the man stands near the top. This is because when the man stands near the top, it creates more torque compared to the torque caused by the weight of man near the bottom.
When the man stands near the bottom, the Centre of Gravity of the ladder is shifted to C’ from C. Now, the couple due to forces (m+M)g and N makes the ladder fall. We see that due to its shift from C to C’, the moment arm of the couple decreases from r to r’; hence, the couple decreases.
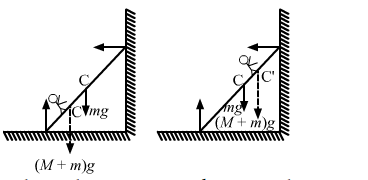
When the man stands near the top of the ladder, the Centre of Mass shifts from C to C’. This increases the moment arm of the couple and from r to r’.Increase in moment arm increases the couple and, thus, the ladder easily falls.
Answer: 17
When the balance is kept at an angle, there is a net extra torque given to one of its arm. When the extra torque is removed, the balance becomes torque free and sum of all the torque acting on it is zero.
But balance kept at an angle has got a greater potential energy compared to the balance kept horizontal. The potential energy acquired is due to the initial torque applied on it. This displaces the balance by an angle. As soon as the body is set free to rotate, the body tends to have the lowest potential energy. Thus, potential energy starts converting in to kinetic energy, but on the other side, kinetic energy converts into potential energy when the other arm of the balance is raised. This energy transformation oscillates the balance. But in this process, friction with the air and fulcrum dissipates energy converting into heat. Finally, the balance loses the energy and becomes horizontal, or attains equilibrium.
Answer: 18
It will require more force to set the bar into rotation by clamping at A and then clamping at B.
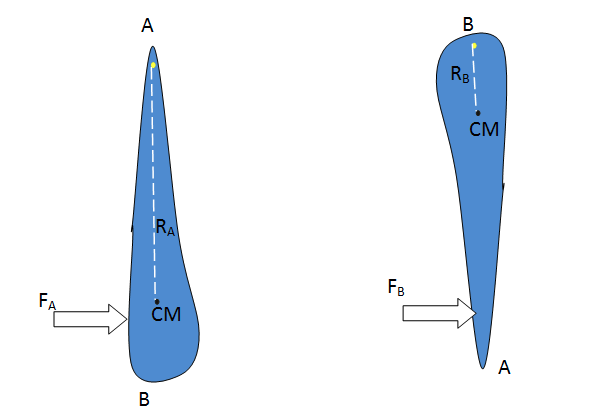
Explanation: Since the rod has mass density increasing towards B, the Center of Mass (CM) of the rod is near B. If the rod is clamped along A, the distance of CM of the rod from the pivot will be greater when the rod is clamped along B. Greater distance of CM from the Center of rotation increases the moment of inertia of the rod and hence more torque will be necessary to rotate the bar about A. Greater torque implies greater force will be necessary to rotate it.
FA = Force required to rotated the rod clamped at A
RA= Distance of CM from pivot A
M = Mass of the rod
FB = Force required to rotate the rod clamped at B
RB= Distance of CM from pivot B
We have RA>RB.
We have to find the torque required to rotate rod clamped at A to produce angular acceleration a.
TA = MRA2a = RAFA
=> FA = MRAa
We have to find torque required to rotate rod clamped at B to produce angular acceleration a.
TB = MRB2a = RBFB
=> FB = MRBa
On comparing, since RA>RB, we get:
FA>FB
Answer: 19
Yes, because tall buildings have their CM much above the ground. It increases moment of inertia of the Earth. As the Earth’s rotation does not involve torque, its angular momentum is constant. Thus, an increase in MI leads to lower angular velocity of the Earth about its axis of rotation. This means length of night and day will increase. However, the increase is very small.
Answer: 20
Ice caps near the poles concentrate the mass of water at the poles through which axis of rotation of the Earth passes. If the ice melts, water will spread across the globe due to hydrostatic equilibrium and tend to move to the equatorial areas of the Earth due to centrifugal force of rotation. Mass, now being distributed more along the equator, will increase MI of the Earth and this in turn will decrease the angular velocity of the Earth. Decrease in angular velocity will increase the duration of day-night.
Answer: 21
The body with the smallest moment of inertia will roll down taking the smallest time. Here, the solid sphere has the lowest moment of inertia among all the other bodies. So, it will roll down taking the least time.
Answer: 22
Some points on the equator of the sphere has got vertical velocity with respect to the direction of motion of the sphere.
Exercise : Solution of Questions on page Number : 193
Answer: 1
(c) 0
For a purely rotating body, the axis of rotation is always perpendicular to the velocity of the particle.
Therefore, we have:
A→.B→ = 0
Answer: 2
(c) 0
The unit vector along the axis of rotation and the unit vector along the resultant force on the particle are perpendicular to each other in a uniform rotation.
Therefore, we have:
A→.B→=0
Answer: 3
(b) remains constant
For angular momentum, we have:
L→=mr→×v→v→=vi^ and r→=xi^+yj^So, L→=-mvyk^
m, v and y are constant; therefore, angular momentum remains constant.
Answer: 4
(d) ω is independent of r
In a pure rotation, angular velocity of all the particles remains same and does not depend on the position of the particle from the axis of rotation.
Answer: 5
(c) y = 2 x
It is given that angular velocity is same for both the wheels.
Therefore, we have:
vA = ωR
vB = ω2R
x = vAt = ωRt … (i)
y = vBt = ω(2R)t … (ii)
From equations (i) and (ii), we get:
y = 2 x
Answer: 6
(c) horizontal and intersecting the axis
Because resultant force on a particle of the body rotating uniformly is always perpendicular to the rotation axis and pass through it.
Answer: 7
(b) horizontal and skew with the axis
The resultant force on a particle of the body rotating non-uniformly is always horizontal and skew with the rotation axis because net torque on the body is non-zero.
Answer: 8
(a) r→.Γ→=0 and F→.Γ→=0
We have:
τ→=r→×F→
Thus, τ→ is perpendicular to r→ and F→.
Therefore,
we have : r→.τ→=0 and F→.τ→=0
Answer: 9
(d) 12mω2l.
Consider a small portion of rod at a distance x from the clamped end (as shown in fig.) with width dx and mass dm.
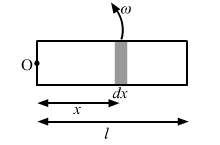
Centripetal force on this portion =ω2xdm
dm=mlldx
Force on the whole rod = F =∫0lω2xmldx
∴ F = 12mω2l
Answer: 10
(c) at a distance l/2 from O.
It is given that there is no force along x-axis.
COM of rod will remain and will not shift along x-axis (horizontal direction).
Force gravity is acting along y-axis (vertical direction). So, COM will shift along the y-axis by l/2 distance and COM of horizontal rod is at a distance l/2 from one end. Therefore, lower end of the rod will remain at a distance l/2 from O.
Answer: 11
(c) IA < IB
Moment of inertia of circular disc of radius r:
I = 12mr2
Mass = Volume × Density
Volume of disc = πr2t
Here, t is the thickness of the disc.
As density is same for both the rods, we have:
Moment of inertia, I∝thickness×radius4
IAIB = t.r4t44r4<1⇒IAIB<1
⇒ IA<IB
Answer: 12
(a) νA > νB
τ=Iα magnitude
For equal torque, we have:
IAαA=IBαB
IA < IB
⇒ αA>αB …(i)
Now, ω=αt
Or, vr=αt
νA > νB (using (i))
Answer: 13
(a) increases
Moment of inertia of a mass is directly proportional to the square of the distance of mass from the axis of rotation.
Therefore, we have:
I∝r2
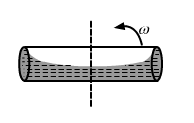
As the tube is rotated, water is collected at the end of tube because of centrifugal force and distance from the rotation axis increases. Hence, moment of inertia increases.
Answer: 14
(a) Mr2
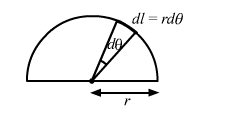
Consider an element of length, dl = rdθ.
dm=Mπrdl=Mπrrdθ
MOI of semicircular wire = ∫0πr2dm
I=∫0πr2mπrrdθ⇒I=mr2
Answer: 15
(a) I1 < I2
In the given case, we have:
MOI ∝ Density
The density of iron is more; therefore, I2 will be greater.
Answer: 16
(d) cannot be deduced with this information.
Ix = m2a2 + m3a2 = 0.20 …(i)
Iy = m1a2 + m3a2 = 0.20 …(ii)
Iz = m1a2 + m2a2 …(iii)
We have three equations and four variables. So, Iz cannot be deduced with the given information.
Answer: 17
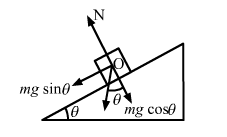
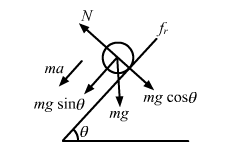
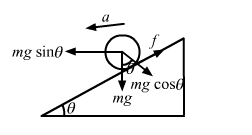
(d) 12 Mga sinθ
Let N be the normal reaction on the block.
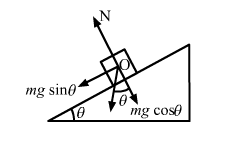
From the free body diagram of the block, it is clear that the forces N and mgcosθ pass through the same line. Therefore, there will be no torque due to N and mgcosθ. The only torque will be produced by mgsinθ.
∴ τ→=F→×r→ Since a is the edge of the cube, r=a2.
Thus, we have : τ=mgsinθ×a2 =12mgasinθ
Exercise : Solution of Questions on page Number : 194
Answer: 18
(b) ω MM+2 m
No external torque is applied on the ring; therefore, the angular momentum will be conserved.
Iω=I’ω’⇒ω’=IωI’ …i
I=Mr2I’=Mr2+2mr2
On putting these values in equation (i), we get:
ω’=ωMM+2 m
Answer: 19
(c) remains unchanged
Rate of change of angular momentum of the body is directly proportional to the net external torque acting on the body.
No external torque is applied on the person or on the table; therefore, the angular momentum will be conserved.
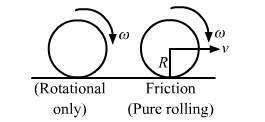
Answer: 20
(c) 2ν0
For pure rolling, ωr=v0
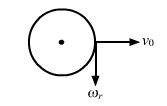
As shown in the figure, the velocity of the particle will be the resultant of v0 and ωr.
Therefore, we have:
vnet=v02+ωr2vnet=v02+v02vnet=2v0
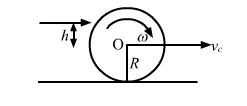
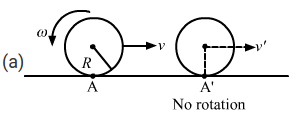
Answer: 21
(a) along the velocity of the wheel
As the distance covered in one revolution about the centre is less than the perimeter of the wheel, it means that the direction of torque due to frictional force opposes the motion of wheel, i.e., the frictional force acting on the wheel by the surface is along the velocity of the wheel.
FIG.
Answer: 22
(d) 0%.
On a frictionless road, we have:
Angular velocity of the engine = 0
Therefore, increase in petrol input will not affect the angular velocity and hence the linear velocity of the scooter will remain the same.
Answer: 23
(d) all will take same time.
The incline is smooth; therefore, all bodies will slip on the incline. Also, as the mass of bodies is same, they will reach the bottom in equal time.
Answer: 24
(d) all will take same time
Let θ be the inclination angle.
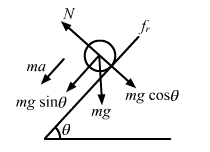
From the free body diagram, we have:
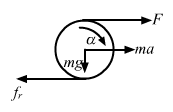
N=mgcosθ…ima=mgsinθ-fr..iiPutting fr=μN in ii we get ,a=gsinθ-μcosθ
The friction coefficients between the objects and the incline are same and not sufficient to allow pure rolling; therefore, all the bodies come down with the same acceleration.
Answer: 25
(b) the hollow sphere
Torque is same for all the bodies; therefore, the angular momentum will be conserved.
Now, total kinetic energy = 12mv2+L22I
So, the body with greater value of moment of inertia will have smallest kinetic energy at the bottom of the incline.
Order of the moment of inertia of the bodies:
hollow sphere > disc > solid sphere
Hence, the hollow sphere will have the smallest kinetic energy at the bottom.
Answer: 26
(b) 2l
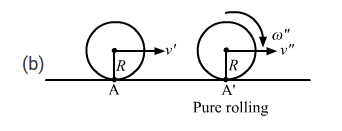
For pure rolling, ωr=v0
Figure:
As shown in the figure, the velocity of the string will be resultant of v0 and ωr.
vnet=v0+ωrvnet=2v0
Let:
Linear distance travelled by the cylinder in time (t), v0t=l
∴ Linear distance travelled by the string in same time, 2v0t=2l
Answer: 1
(b) may pass through the centre of mass
(d) may pass through a particle of the body
It is not necessary that the axis of rotation of a purely rotating body should pass through the centre of mass or through a particle of the body. It can also lie outside the body.
Answer: 2
(b) A is true but B is false.
In non-inertial frames, dLdt=Γtotal
Here, Γtotal is is the total torque on the system due to all the external forces acting on the system. So, equation (B) is not true as in non-inertial frames, pseudo force must be applied to study the motion of the object.
Answer: 3
(b) is zero about a point on the straight line
(c) is not zero about a point away from the straight line
(d) about any given point remains constant
(b) Angular momentum = mr→×v→
If the point is on the straight line, r→and v→ will have the same direction and their cross product will be zero. Hence, angular momentum is zero.
(c) If the point is not on the straight line, r→and v→ will not have the same direction and their cross product will not be zero. Hence, angular momentum is non-zero.
(d) No external torque is applied on the body; therefore, its angular momentum about any given point remains constant.
Answer: 4
(a) angular momentum
(b) linear momentum
F→ext=0⇒τ→ext=0
That is, the change in linear momentum and angular momentum is zero.
This is because :
dP→dt=F→extAnd dL→dt=τ→ext
Answer: 5
(c) If the axes are parallel, IA < IB
If axes A and B are parallel, we get:
IB=IA+mr2
Here, r is the distance between two axes and m is the mass of the body.
∴ IA < IB
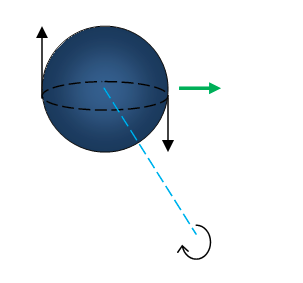
Answer: 6
(b) The particles on the diameter mentioned above do not have any linear acceleration.
Explanation:
Linear acceleration of a rotating particle is given as:
a→=r→×α→
(b)
The sphere is rotating about a diameter; therefore, the position vector of the particles on the diameter is zero. Thus, linear acceleration of the particle is zero.
(c) and (d)
All the particles of the body have the same angular velocity. All the particle on the surface have different linear speeds that depend on the position of the particle from the axis of rotation.
Exercise : Solution of Questions on page Number : 195
Answer: 1
Given:
t = 4 s
Initial angular velocity = ω0=0
Final angular velocity = ω=100 rev/s
ω=ω0+αtα=ωtα=1004 rev/s2=25 rev/s2Now, we have:θ=ω0t+12αt2⇒θ=12×25×16=200°⇒θ=200×2π radians=400π radians
Answer: 2
Given:
Angular displacement of the wheel = θ=50×2π=100π
Initial angular velocity of the wheel = ω0=0
After, t = 5 seconds
θ=ω0t+12αt2⇒100π=12×α× (5)2⇒100π=12×α× 25⇒α=8π rad/s2 or 4 rev/sω=ω0+2αt⇒ω=0+8π×5=40π rad/s⇒ω=20 rev/s
Answer: 3
It is given that the area under the ω-t curve gives the total angular displacement.
∴ Maximum angular velocity = ω=αt
ω=4×10=40 rad/s
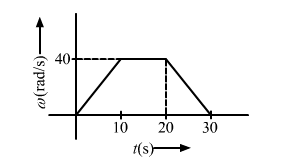
Area under the curve
=12×10×40+40×10+12×40×10=800 rad
∴ Total angle rotated in 30 s = 800 rad.
Answer: 7
(d) torque of the applied force
The torque of the applied force does not depend on the density of a rod. It depend on the distance between the pivot and the point where F is applied. So, it does not depend on which end of the rod is pivoted.
Answer: 8
(a) the speed of the particle A is zero
(c) the speed of C is 2 v0
(d) the speed of B is greater than the speed of O
For pure rolling, ωr=v0
Velocity of the particle at A, B, C and D will be resultant of v0 and ωr.
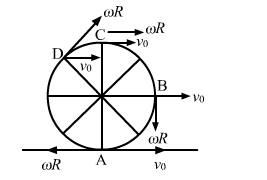
At point B,
vnet=v02+ωr2vnet=v02+v02vnet=2v0
At point C,
vnet=v0+ωrvnet=2v0
At point A,
vnet=v0-ωrvnet=0
At point O,
r = 0
∴ vnet=v0
Answer: 9
(c) the two spheres reach the bottom together
Acceleration of a sphere on the incline plane is given by:
a=gsinθ1+ICOMmr2ICOM for a solid sphere=25mr2So, a=gsinθ1+2mr25mr2=57gsinθ
a is independent of mass and radii; therefore, the two spheres reach the bottom together.
Answer: 10
(b) The solid sphere reaches the bottom with greater speed.
Acceleration of a sphere on the incline plane is given by:
a=gsinθ1+ICOMmr2ICOM for a solid sphere=25mr2So, a=gsinθ1+2mr25mr2=57gsinθ
ICOM for a hollow sphere=23mr2So, a’=gsinθ1+2mr23mr2=35gsinθ
The acceleration of the solid sphere is greater; therefore, it will reach the bottom with greater speed.
Answer: 11
(a) a smooth horizontal surface
(b) a smooth inclined surface
A sphere cannot roll on a smooth inclined surface and on a smooth horizontal surface because there is no backward force (force of friction) to prevent its slipping.
Answer: 12
(a) on the rear wheels is in the forward direction
(b) on the front wheels is in the backward direction
(c) on the rear wheels has larger magnitude than the friction on the front wheels
Explanation:
(a) On the rear wheels, friction force is in the forward direction because it favours the motion and accelerates the car in forward direction.
(b) Because of the movement of the car in forward direction, front wheels push the road in forward direction and in reaction, the road applies friction force in the backward direction.
(c) As the car is moving in forward direction, the rear wheels have larger magnitude of friction force (in forward direction) than on the front wheels.
Answer: 13
(c) it will translate and rotate about the centre
The given coefficient of friction (17g tanθ) is less than the coefficient friction (27g tanθ) required for perfect rolling of the sphere on the inclined plane. Therefore, sphere may slip while rolling and it will translate and rotate about the centre.
Answer: 14
(a) decrease the linear velocity
(b) increase the angular velocity
If a sphere is rolled on a rough horizontal surface, the force of friction tries to oppose the linear motion and favours the angular motion.
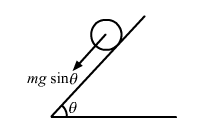
Answer: 15
(a) it will continue pure rolling
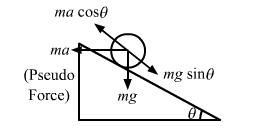
From the free body diagram of sphere, we have:
Net force on the sphere along the incline,
Fnet = mgsinθ − macosθ …(i)
On putting a = gtanθ in equation (i), we get:
Fnet = 0
Therefore, if the sphere is set in pure rolling on the incline, it will continue pure rolling.
Exercise : Solution of Questions on page Number : 196
Answer: 4
Given:
Angular acceleration of the body = α=2 rad/s2
Initial angular velocity of the body = ω0=5 rad/s
Final angular velocity of the body = ω=15 rad/s
We know that:ω=ω0+αt⇒t=ω-ω0α=15-51=10 sAlso, θ=ω0t+12αt2⇒θ=5×10+12×1×100⇒θ=50+50=100 rad
Answer: 5
Angular displacement of the body,
θ=5 rev=10π radα=2 rev/s2=4π rad/s2Initial angular velocity, ω0=0Final angular velocity, ω=?ω2=2αθ⇒ω=2×4π×10π=4π5 rad/s ⇒ω=25 rev/s
Answer: 6
Radius of disc = r = 10 cm = 0.1 m
Angular velocity of the disc = ω = 20 rad/s
∴ Linear velocity of point on the rim = v=ωr
⇒v=20×0.1=2 m/s
∴ Linear velocity of point at the middle of radius v=ωr2=20×0.12= 1 m/s
Answer: 7
Angular acceleration of the disc, α=4 rad/s2
Distance of the particle from the axis of rotation, r=1 cm=0.01 m
So, ω=αt=4 rad/s (t= 1 s)
Radial acceleration,
αr=ω2r=42×0.01 =0.16 m/s2=16 cm/s2
Tangential acceleration,
αT=αr=0.04 m/s2 =4 cm/s2
Answer: 8
It is given that the string is moving on the rim of the disc and block is connected with the string.
Therefore, the speeds of the block going down and the rim will be same.
Angular speed of the disc, ω = 10 rad/s
Radius of the pulley, r = 20 cm
Linear velocity of the rim, v = Tangential velocity = rω
v = 10 × 20 = 200 cm/s = 2 m/s
Therefore, velocity of the block = 2 m/s
Answer: 9
(a) The distance of mass at A from the axis passing through side BC,
AD=32×10=53 cm
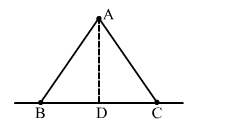
Therefore, we have:
Moment of inertia of mass about the axis BC,
l=mr2=200×532=200×25×3=15000 gm-cm2=1.5×10-3 kg-m2
(b) Now, let the axis of rotation passes through A and is perpendicular to the plane of triangle.
Therefore, we have:
Net moment of inertia,
l=mr2+mr2 =2 mr2 =2×200×102 =400×100 =40000 gm-cm2 =4×10-3 kg-m2
Answer: 10
It is given that the perpendicular bisector of the metre scale is passed through the 50th particle.
Therefore, on the L.H.S. of the axis, there will be 49 particles and on the R.H.S., there will be 50 particles.
Consider the two particles positioned at 49 cm and 51 cm.
Moment of inertia due to these two particles = 49 × (1)2 + 51 × (1)2
I1 = 100 × 1 = 100 gm-cm2
Similarly, if we consider particles positioned at 48 cm and 52 cm, we get:
I2 = 100 × (2)2 gm-cm2.
Thus, we will get 49 such sets and one particle at 100 cm. Therefore, total moment of inertia,
I=I1+I2+I3…..+I49 +I’
Here, I’ is the moment of inertia of particle at 100 cm.
So, I=100 12+22+32++492+100 502 =100 12+22+32++502=100×50×51×1016 =100×25×17×101=4292599 gm-cm2
Or, I = 0.429 kg-m2 ≃ 0.43 kg-m2
Answer: 11
It is given that two bodies of mass m and radius r are moving along a common tangent.
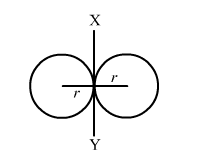
Moment of inertia of the first body about XY tangent, I’=Icom+mr2
So, I’=25mr2+mr2=75mr2
Moment of inertia of the second body about XY tangent,
I”=25mr2+mr2=75mr2
Therefore, net moment of inertia,
I=I’+I”I=75mr2+75mr2
= 145 mr2 units
Answer: 12
Given:
Length of the rod, l = 1 m
Mass of the rod, m = 0.5 kg
Let the rod moves at a distance d from the centre.
On applying parallel axis theorem, we get:
Moment of inertia about that axis,
I=ml212+md2=0.10
Answer: 13
Moment of inertia of the ring about a point on the rim of the ring and the axis perpendicular to the plane of the ring = mR2 + mR2 = 2mR2 (from parallel axis theorem)
We know that : mK2=2mR2K=Radius of the gyration⇒K=2R2=2R
Answer: 14
Moment of inertia of the disc about the centre and perpendicular to the plane of the disc = 12mr2
Radius of gyration of the disc about a point = Radius of the disc
Therefore, mk2=12mr2+md2
(k = Radius of gyration about acceleration point; d = Distance of that point from the centre)
⇒K2=r22+d2⇒r2=r22+d2⇒r22=d2⇒d=r2
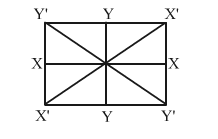
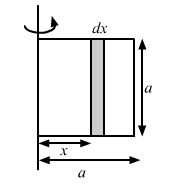
Answer: 15
Let there be a small sectional area of width dx at a distance x from the x-axis.
So,
Mass of element =ma2×a×dx
Moment of inertia about x-axis, Ixx=2∫0a/2ma2×adx×x2
⇒Ixx=2×max330a/2=2maa33×8=ma212Similarly, Iyy=ma212
Now, Izz=Ixx+Iyy Perpendicular axis theorem⇒Izz=2×ma212=ma26
The two diagonals are perpendicular to each other; therefore, we have:
Izz=Ix’x’+Iy’y’Also,Ixx=Iyy⇒Izz=2Ix’x’ ⇒Ix’x’=ma212
Answer: 16
Consider a ring of thickness dx at a distance r from the centre of the disc.
Mass of the ring , dm=A+Br×2πr×dr
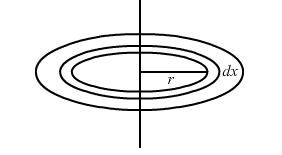
Therefore, moment of inertia about the centre,
I= ∫0 ar2dm
=∫oadA+Br 2πr.dr×r2=∫oa2πAr3 dr+∫oa 2πBr4 dr=2πA r44+2πB r550a=2πAa44+Ba55
Answer: 17
Range of the particle =u2sin2θg
At the highest point, we have:
Total force acting on the particle = mg (downward)
Distance between the line of force and the point of projection,
total range2=u2sin2θ2g
So,τ→=F→×d⊥=mg×u2sin2θ2g τ→=mu2sin2θ2 =mu2sinθcosθ
Therefore, the direction of torque is perpendicular to the plane of the motion.
Answer: 18
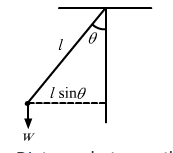
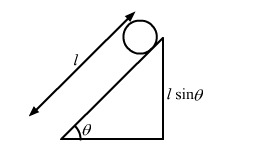
Distance between the line of force and point of suspension, r = lsinθ
Torque, τ→=F→×r→⇒τ=wrsinθ=wlsinθ
Here, w is the weight of the bob.
The torque will be zero when the force acting on the body passes through the point of suspension, i.e., at the lowest point of suspension.
Answer: 19
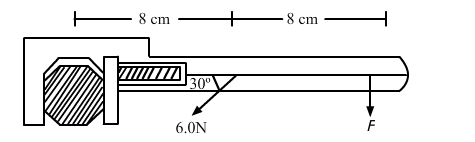
In the first case,
τ1=6sin30°×8100
In first case,
τ2=F×16100
To loosen the nut, torque in both the cases should be the same.
Thus, we have:
τ1=τ2
⇒F×16100=6sin30°×8100
⇒F=8×316=1.5 N
Answer: 20
Torque about a point = Total force × Perpendicular distance
Let the anticlockwise torque and clockwise acting torque be positive and negative, respectively.
Torque at O due to 5 N force is zero as it is passing through O.
Torque at O due to 15 N force,
τ1=15×6×10-2×sin37°=15×6×10-2×35 =0.54 N-m anticlockwise
Torque at O due to 10 N force,
τ2=10×4×10-2=0.4 N-m clockwise
Torque at O due to 20 N force,
τ3=20×4×10-2×sin30°=20×4×10-2×12=0.4 N-m Anticlockwise
Resultant torque acting at O,
τ=0.54-0.4+0.4 =0.54 N-m anticlockwise
Answer: 21
Let N be the normal reaction on the block.
From the free body diagram of the block, it is clear that forces N and mgcosθ pass through the same line. So, there will be no torque due to N and mgcosθ. The only torque will be produced by mgsinθ.
∴ τ→=F→×r→ a is the edge of the cube. Therefore, we have: r=a2
∴ τ=mgsinθ×a2 =12mgasinθ
Answer: 22
Torque about the centre due to force,
τ→=F→×r→=F×L4×sin90°τ=F×L4
Let the torque produces an angular acceleration α.
τ=Iα⇒τ=mL212×α I of a rod=mL212⇒FL4=mL212×α⇒α=3FmL
Now, θ=12αt2 (initially at rest)⇒θ=3Ft22mL
Answer: 23
Consider a small area element of width dx and length a at a distance x from the axis of rotation.
Mass of element, dm =ma2×adx
(m = mass of the square, a = side of the plate)
l=∫0ax2dml=∫0ama2×ax2 dx =max330a=ma23
Now, torque produced,
τ=ma23×α =120×10-3×52×10-43×.02 =40×25×10-7×0.2 =2×10-5 N-m.\
Answer: 24
Moment of inertia of a square plate about its diagonals,
I = ma212
Therefore, we have:
Torque produced, τ=Iα
⇒ τ=ma212×α=120×10-3×52×10-412 ×0.2=10×25×10-4× 0.2 =0.5×10-5 N-m
Answer: 25
Let the angular deceleration produced due to frictional force be α.
Initial angular acceleration, ω0=60 rad/s
Final angular velocity, ω=0
t = 5 min =300 s
We know that:
ω=ω0+αt
⇒α=-ω0t⇒α=-60300=-15 rad/s2
(a) Torque produced by the frictional force (R),
τ=Iα=5×-15 =1 N-m opposite to the rotation of wheel
(b) By conservation of energy,
Total work done in stopping the wheel by frictional force = Change in energy
W=12Iω2 =12×5×60×60 =9000 joule=9 kJ
(c) Angular velocity after 4 minutes,
ω=ω0+αt =60-4×605 =605=12 rad/s
So, angular momentum about the centre,
L=Iω =5×12=60 kg-m2/s
Answer: 26
Rate of change of angular velocity, i.e., angular acceleration,
α = 0.0016100 rad/day
⇒α=0.0016864002×100×365 1 year=365 days=365×86400 sec
Torque produced by the ocean water in decreasing the Earth’s angular velocity,
τ=Iα=25mr2α =25×6×1024×64×1052×0.0016864002×100×365 =5.8×1020 N-m
Exercise : Solution of Questions on page Number : 197
Answer: 27
Initial angular velocity of the wheel,
ω0=600 rpm=60060=10 revolutions per second
After 10 seconds,
Final angular velocity of the wheel, ω=0
So, ω0=-at⇒α=-1010=-1 rev/s2
Now, t=5 sWe know that:ω’=ω0+at⇒ ω’=10-1×5=5 rev/s
Answer: 28
Initial angular velocity of the wheel,
ω=100 rev/min =10060=53 rev/s=10π3 rad/sθ=10 rev=20π radr=0.2 m
Angular deceleration produced by the tangential force in order to stop the wheel after 10 revolutions, α=ω22θ
Torque by which the wheel will come to rest, τ=Icmα
Or,⇒ τ=Fr=IcmαPutting the values of Icm and α, we get:Fr=12mr2×10π32×12×20π⇒F=12×10×0.2×100π29×2×20π⇒F=5π18=15.718=0.87 N
Answer: 29
After t seconds, let the angular velocity of two cylinders be ω.
For the first cylinder,
ω0=50 rev/s, α=1 rev/s2
∴ ω=50-αt⇒ t=ω-50-1
For the second cylinder,
ω0=0, α=1 rev/s2
∴ ω=αt⇒ t=ω1
On equating the value of t, we get:ω=ω-50-1⇒2ω=50⇒ω=25 rev/s
∴ t=251 s=25 s
Answer: 30
Given:
Initial angular acceleration, ω0 = 20 rad/s
Angular deceleration, α=2 rad/s2
⇒t1=ω0α1=202=10 s
So, in 10 s the body will come to rest.
The same torque continues to act on the body, therefore, it will produce the same angular acceleration.
The kinetic energy of the body is same as the initial value; therefore, its angular velocity should be equal to the initial value ω0.
Therefore, time required to come to that angular velocity,
t2=ωα=202=10 s
So, total time required,
t=t1+t2=20 s
Answer: 31
Total moment of inertia of the system about the axis of rotation,
Inet=m1r12+m2r22τnet=F1r1-F2r2Also, τnet=Inet×α
On equating the value of τnet and putting the value of Inet,
we get:
F1r1-F2r2=m1r12+m2r22×α
-2×10×0.5+5×10×0.5=5122+2122 α⇒15=74 α⇒α=607=8.57 rad/s2
Answer: 32
Total moment of inertia of the system about the axis of rotation,
Inet=m1r12+m2r22+ml212m and l are the mass and length of the rod, respectively. τnet= F1r1-F2r2Also, τnet=Inet×α
On equating the value of τnet and putting the value of Inet, we get:
F1r1-F2r2=m1r12+m2r22+ml212×α
-2×10×0.5+5×10×0.5=5122+2122+1212 α
⇒ 15=1.75+0.084 α⇒α=1500175+8.4=1500183.4 =8.1 rad/s2 g=10 =8.01 rad/s2 if g=9.8
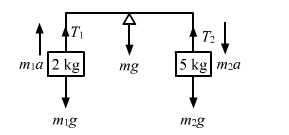
(b) From the free body diagram of the block of mass 2 kg,
T1-m1g=m1a⇒T1=2 a+g =2αr+g using, a=αr =28×0.5+9.8⇒T1=27.6 N
From the free body diagram of the block of mass 5 kg,
m2g-T2=m2a⇒T2=m2g-a =5 g-a=5 9.8-8×0.5 a=αr =5×5.8=29 N
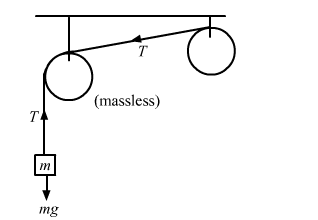
Answer: 33
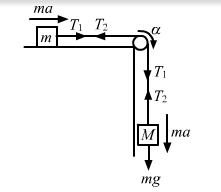
According to the equation, we have:
Mg-T1=Ma … (i) T2=ma… (ii)⇒T1-T2=Iar2 …(iii)
Because, a=ra If we add the equations (i) and (ii), we get:
Mg+T2-T1=Ma+ma … (iv)⇒Mg-Iar2=Ma+ma⇒M+m+Ir2 a=Mg⇒a=MgM+m+Ir2
Answer: 34
Moment of inertia of the bigger pulley, I = 0.20 kg-m2
r = 10 cm = 0.1 m,
Smaller pulley is light. Therefore, on neglecting its moment of inertia, we have:
Mass of the block, m = 2 kg
From the free body diagram, we get:
mg-T=ma … (i)
Tr=Iα And a=αr
⇒T=Iar2 … (ii)
Using equations (i) and (ii), we get:
mg=m+Ir2 a⇒ a=mgm+Ir2 =2×9.82+0.20.01=19.622=0.89 m/s2
Answer: 35
Given:
m = 2 kg, I1 = 0.10 kg-m2
r1 = 5 cm = 0.05 m
I2 = 2.20 kg-m2
r2 = 10 cm = 0.1 m
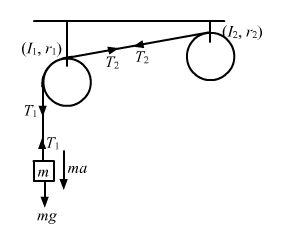
From the free body diagram, we have:
mg-T1=ma … (i)T1-T2 r1=I1 α … (ii)T2r2=I2α … (iii)
Substituting the value of T2 in the equation (ii), we get:
⇒T1-I2αr2 r1=I1α⇒T1-I2ar22=I1ar12⇒T1=I1r12+I2r22a
Substituting the value of T1 in the equation (i), we get:
mg-I1r12+I2r22a=ma
⇒ mgI1r12+I2r22+m=a⇒a=2×9.80.10.0025+0.20.01+2 =0.316 m/s2⇒T2=I2ar22=0.20×0.3160.01=6.32 N
Answer: 36
Free the body diagram of the system,
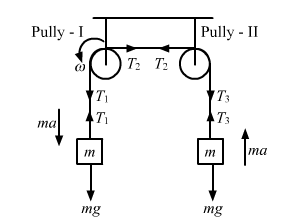
For block of mass M,
Mg-T1=Ma … (i)
T1-T2 R=Iαusing, a=αr⇒T1-T2=IaR2.. (ii) For pully 1
Similarly, T2-T3=IaR2… (iii) For pully 2
For block of mass m,
T3-mg=ma …(iv) For block m
Adding equations (ii) and (iii),
we get:
T1-T3=2IaR2 …(v)
Adding equations (i) and (iv),
we get:
-mg+Mg+T3-T1=Ma+ma …(vi)
Using equations (v) and (vi),
we get:
Mg-mg = Ma+ma+2IaR2⇒a=M-mgM+m+2IR2
Answer: 37
Let the mass of block be m1 and mass of pulley be m2.
Acceleration of the massive pulley will be half of that of the block.
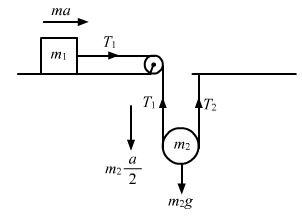
From the free body diagram, we have:
T1=m1a … (i)
T2-T1 r=IαT2-T1=Ia2r2=5a2 … (ii)
m2g-m2a2=T1+T2 … (iii)
Putting the value of mass in equation (i) and using equation (i) in equation (ii), we get:
T1=a and T2=72a
m2g=m2a2+72a+aOn replacing the value of m2 using 12mr2=I,
we get : 2Ir2g=2Ir2a2+92a ⇒98=5a+4.5a⇒a=989.5=10.3 m/s2
Answer: 38
From the figure, we have:
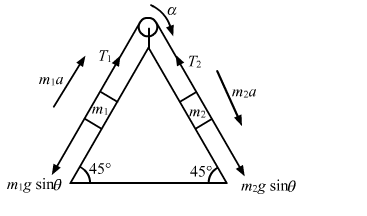
T1-m1gsinθ=m1a … (i)
T2-T1=Iar2 … (ii)
m2gsinθ-T2=m2a.. (iii)
Adding equations (i) and (iii), we get:
m2gsinθ+-T2+T1-m1gsinθ= m1+m2a
⇒ m2-m1 gsinθ+-Ir2a=(m1+m2)a⇒ m2-m1 gsinθ=(m1+m2)a+Ir2a⇒ a=m2-m1gsinθm2+m1+Ir2 =4-2×10×124+2+0.5/0.01 =2×10×126+50 =0.248=0.25 m/s2
Answer: 39
From the figure, we have:
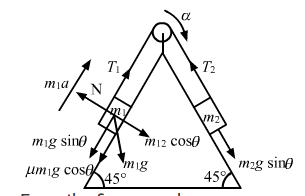
m2gsinθ-T2=m1a …i
T1-m1gsinθ+μm1gcos θ=m1a …ii
T2-T1=Iar2 …iii
Adding equations (i) and (ii),
we get:
m2gsinθ-m1gsinθ-μm1gcos θ+T1-T2=m1a+m2a
m2gsinθ-m1gsinθ+μm1gcos θ-Iar2=m1a+m2am2gsinθ-m1gsinθ+μm1gcos θ=m1a+m2a+Iar2
4×9.8×12-2×9.8×12+0.5×2×9.8×12=4+2+0.50.01a⇒27.80-13.90+6.95=56a⇒27.8-20.8=56a⇒a=756=0.125 m/s2
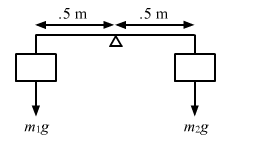
Answer: 40
Given:
Mass of the stick = m1=200 g
Mass of the small object = m2=20
Length of the string = l=1 m
As the system is in equilibrium, we have:
τtotal=0 about O
T1×r1-T2×r2-m1g×r3=0
⇒T1×0.7-T2×0.3-2×0.2×g=0⇒7T1-3T2=3.92 … (i)
Now, we have:
Total upward force = Total downward force
T1+T2=m1g+m2g =0.2×9.8+0.02×9.8⇒T1+T2=2.156 …ii
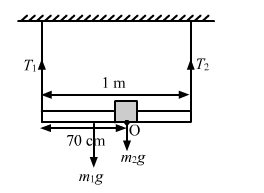
Solving equations (i) and (ii), we get:
T1=1.038 N≈1.04 N;T2=1.18≈1.12 N
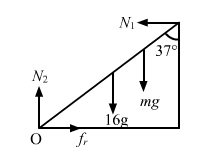
Answer: 41
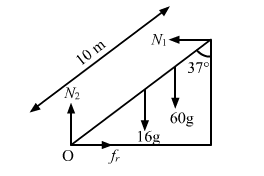
Let N2 be the normal force on the ladder by the ground.
Let N1 be the normal force on the ladder by the wall.
Let fr be the force of friction on the ladder by the ground.
As system is in translation equilibrium, we have:
N1=fr=μN2 ; N2=16 g+60 g=745 N
Applying condition of rotational equilibrium at point O,
i.e., about point O, we have:
Γtotal=0
N1×10 cos37°=16g×5sin37°+60g×8sin37°
⇒8N1=48g+288g⇒N1=336×9.88=412 N∴ μ=N1N2=412745=0.553
Exercise : Solution of Questions on page Number : 198
Answer: 42
Let the maximum mass of a mechanic who could go up be m.
The system is in translation and rotational equilibrium; therefore, we have:
N2=16 g+mg …i
N1=μN2 …ii
R1×10cos37°=16g×5sin37°-mg×8 sin37° …iii
⇒8N1=48g+245mgFrom eq. (ii),
we have : N2=48 g+245 mg8×0.54
Putting the value of N2 in eq. (i),
we have : 16g+mg=24.0g+24mg5×8×0.54⇒16+m=24.0+24m40×0.54⇒m=44 kg
Therefore, weight of the mechanic, who can go up and do the work, should be less than 44 kg.
Answer: 43
Given:
Mass of the man = m = 60 kg
Ladder length = 6.5 m
Height of the wall = 6 m
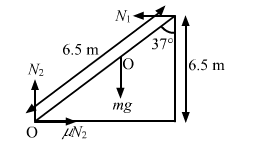
(a) We have to find the torque due to the weight of the body about the upper end of the ladder.
τ=60×10×6.52sinθ⇒τ=600×6.52×1-cos2θ⇒τ=600×6.52×1-66.52⇒τ=740 N-m
(b) Let us find the vertical force exerted by the ground on the ladder.
R2=mg=60×9.8=588 N
Vertical force exerted by the ground on the ladder = μR2=R1
As system is in rotational equilibrium, we have:
τnet=0 about O
⇒6.5N1cosθ=60g×6.52sinθ
⇒N1=1260gtanθ=1260g×2.56 using, tanθ=2.56⇒N1=252g⇒N1=122.5 N≈120 N
Answer: 44
It is given that the magnitudes of the forces exerted by the hinges on the door are equal.
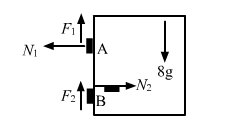
Therefore, we have:
Resultant of N1 and F1 at point A = Resultant of N2 and F2 at point B
⇒N12+F12=N22+F22 …(i)
System is in translation equilibrium. Therefore, we have:
N1 = N2;
8g=F1+F2
Putting the value in eq. (i), we get:
F1 = F2
⇒2F1=8g⇒F1=40
Let us take the torque about point B. We get:
N1×4=8g×0.75⇒N1=80×34×4=15 N
Now, the forces exerted by the hinges A on the door,
F12+N12=402+152=42.72=43 N
Answer: 45
Given:
Length of rod = L
It makes an angle θ with the floor.
Height of the wall is h.
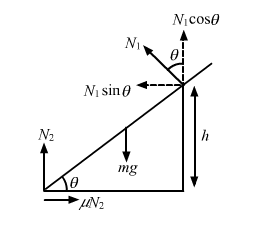
The system is in translational equilibrium; therefore, we get:
N2=mg-N1cosθ … i
N1sin θ=μN2 … ii
System is in rotational equilibrium; therefore,
we have : N1cosθ×htanθ+N1sinθ×h=mg×L2 cosθ⇒N1=mg×L2cosθcos2θsinθh+hsinθ⇒N1cosθ=12mgLcos2θcos2θsinθh+hsinθ
From equation (ii),
we have:
μ=N1sinθN2 =N1sinθmg-N1cosθ⇒μ=L/2cosθsinθ×2sinθ2 cos2θ +sin2θh-Lcos2θsinθ⇒μ=Lcosθsin2θ2h-Lcos2θsinθ
Answer: 46
Given:
Mass of the rod = m = 300 gm
Length of the rod = l = 50 cm
Angular velocity of the rod = ω=2 rad/s
(a) Moment of inertia about one end of the rod,
I=mL23=0.3×0.5023⇒I=0.2510=0.025 kg-m2
Angular momentum about that point, L=Iω
L = 0.025 × 2 = 0.05 kg-m2/s
(b) Speed of the centre of the rod,
v=ωr=2×0.502=0.5 m/s
(c) Kinetic energy, K=12Iω2
⇒K=12×0.025×22=12×0.025×4=0.05 joule
Answer: 47
Given:
Torque acting on the plate = τ=0.10 N-m
Mass of the plate = m=2 kg
On applying τ=Iα, we get:mr212×α=0.10 N-m⇒α=60 rad/s
Let ω be the angular velocity after time t (t = 5 s).
Therefore, we have: ω=ω0+at⇒ω=60×5=300 rad/s Angular momentum, Iω=0.1060×300=0.50 kg-m2/s Kinetic energy,12Iω2=12×0.1060×3002 =75 joule
Answer: 48
Given:
r = 6400 km = 6.4 × 106 m;
R = 1⋅5 × 108 km = 1⋅5 × 1011 m
About its axis, we have:
T = 1 day = 86400 s;
ω=2πT
Angular momentum of the Earth about its axis,
L=Iω =25mr2×2π86400
About the Sun’s axis,
T = 365 day = 365 × 86400 s
Angular momentum of the Earth about the Sun’s axis,
L’=mR2×2π86400×365
Ratio of angular momentums,
LL’=2/5mr2×2π/86400mR2×2π/86400×365 =2r2×3655R2=2×6.4×1062×3655×1.5×10112 =2.65×10-7
Answer: 49
Distance of centre of mass from mass m1,
d1=m2rm1+m2
Angular momentum due to the mass m1 at the centre of system,
L1=I1ω=m1d12ω=m1m2rm1+m22ω
⇒L1=m1m22r2m1+m22ω … 1
Similarly, the angular momentum due to the mass m2 at the centre of system,
L2=m2m1rm1m22ω =m2m12r2m1+m22ω … 2
Therefore, net angular momentum,
L=L1+L2 =m1m22r2ωm1+m22+m2m12r2ωm1+m22 =m1m2 m1+m2 r2 ωm1+m22 =m1m2m1+m22r2ω =μr2ω
Answer: 50
Moment of inertia of the dumb-bell,
I=mr2+mr2=2mr2
Torque, τ=Iα
⇒ F×r=mr2+mr2 α⇒5×0.25 = 2mr2×α⇒α=1.252×0.5×0.252=20 rad/s2
Given:
ω0=10 rad/s and t=0.10 s
Using ω=ω0+αt, we get:ω=10+20×0.10=10+2=12 rad/s
Answer: 51
Given:
Initial moment of inertia of the system,
I1 = 0.500 kg-m2;
r = 0.2 m;
ω = 20 rad/s
Mass of the stationary particle, m = 0.2 kg
Final moment of inertia of the system,
I2 = I1 + mr2
It is given:
External torque = 0
Angular momentum is conserved; therefore,
we have:
I1ω1=I2ω2
⇒0.5×20=0.5+0.2×0.22 ω2⇒ω2=100.508≈19.7 rad/s
Answer: 52
Initial moment of inertia of diver, I1 = 6 kg-m2
Initial angular velocity of diver, ω1 = 2 rad/s
Final moment of inertia of diver, I2 = 5 kg-m2
Let ω2 be the final angular velocity of the diver.
We have:
External torque = 0
∴ I1ω1 = I2ω2
⇒ω2=6×25=2.4 rad/s
Answer: 53
Given:
Initial angular speed of the system,
ω1=120 rpm=120×2π60=4π rad/s
Initial moment of inertia of the system,
I1=6 kg-m2
Final moment of inertia of the system,
I2=2 kg-m2
Two balls are inside the system; therefore, we get:
Total external torque = 0
∴ I1ω1=I2ω2
⇒6×4π=2ω2⇒ω2=12π rad/sOr, ω2=6 rev/s=360 rev/minute
Answer: 54
Given:
Moment of inertia of umbrella = I1 = 2 × 10−3 kg-m2
Moment of inertia of the system = I2 = 3 × 10−3 kg-m2
Angular speed of the umbrella with respect to the boy = ω1 = 2 rev/s
Let the angular velocity imparted to the platform be ω2.
Taking the Earth as the reference, we have:
Angular velocity of the umbrella = (ω1 − ω2)
Applying conservation of angular momentum, we get:
I1ω1-ω2=I2ω2⇒2×10-3 2-ω2=3×10-3ω2⇒5ω2=4⇒ω2=0.8 rev/s
Answer: 55
Given:
For the first wheel,
I1 = 10 kg-m2 and ω1 = 160 rev/min
For the second wheel, ω2 = 300 rev/min
Let I2 be the moment of inertia of the second wheel.
After they are coupled, we have:
ω = 200 rev/min
If we take the two wheels to be an isolated system, we get:
Total external torque = 0
Therefore, we have:
I1ω1+I2ω2=I1+I2 ω
⇒0.10 ×160+I2×300=0.10+I2 × 200⇒16+300I2=20+200I2⇒100I2=4⇒I2=4100=0.04 kg-m2
Answer: 56
On considering two bodies as a system, we get:
Moment of inertia of kid and ball about the axis =M+m R2
Applying the law of conservation of angular momentum, we have:
mνR=I+M+m R2 ω
⇒ω=mνRI+M+m R2
Answer: 57
Initial angular momentum of the system is zero (L1 = 0).
Let the platform starts rotating with an angular velocity ω.
Therefore, we have:
Final angular momentum of the system = L2 =Iω+MR2ω-mvR
(m = mass of the ball, v = velocity of the ball)
Total external torque = 0
Also,
Initial angular momentum = Final angular momentum
⇒Iω+MR2 ω-mvR=0⇒ω=mvRI+MR2
Answer: 58
Let ω’ be the angular velocity of platform after the kid starts walking.
Let ω be the angular velocity of the wheel before walking.
When we see the (kid-wheel) system from the initial frame of reference, we can find that the wheel moves with a speed of ω and the kid with a speed of ω’+νR, after the kid has started walking.
Initial angular momentum of the system = (I + MR2)ω
Angular velocity of the kid after it starts walking = ω’+vR
External torque is zero; therefore, angular momentum is conserved.
⇒I+MR2ω=Iω’+MR2 ω’+vR⇒I+MR2ω=Iω’+MR2 ω’+vR⇒I+MR2ω-MvR= I+MR2 ω’⇒ω’=I+MR2ω -MvRI+MR2⇒ω’=ω- MvRI+MR2
Exercise : Solution of Questions on page Number : 199
Answer: 59
Given:
Mass of the rod = m
Length of the rod = l
(a) For the centre of mass,
Acceleration, a=Fm
Velocity, v=at⇒v=Ftm
(b) Let the angular speed about the centre of mass be ω.
Moment of inertia of rod about centre of mass = I=ml212
Iω=mvr
⇒ml212×ω=mνl2⇒ml212×ω=m×Ftm×l2⇒ω=6Ftml
(c) Kinetic energy,
K.E.=12mν2+12Iω2 =12×m(Ftm)2+12×Iω2 =12×m(F2t2m2)+12×ml212×(36F2t2m2l2) =2F2t2m
(d) Angular momentum about the centre of mass,
L=mνr =m×Ftm×(l2)=Flt2
Answer: 60
Let initial velocity of the particle = u1
Let final velocity of the particle = v1
Let time taken to move π/2 angle = t
Given v1 = 0
Let initial velocity of CM of the rod = u2
Given u2 = 0
Let final velocity of the CM of rod = v2
By conservation of linear momentum
mu1 + Mu2 = mv1 + Mv2
=> v2 = (m/M)u1 —(1)
Now by we consider the angular momentum imparted by the particle to the rod.
mu1(L/2) = Iω
For rod about its CM, I = ML2/12
mu1(L/2) = ωML2/12
=> ω = 6mu1/ML —2.
Now we know
ω = θ/t
θ = π/2
=> t = θ/ω = (π/2)/(6mu1/ML)
=> t = πML/(12mu1)
Linear distance moved by the CM of the rod will be
s = v2t
By equation 1.
s = [πML/(12mu1)]× (m/M)u1
= πL/12
Initial KE of the particle is ½m(u1)2
KE of the CM of the rod = ½M(v1)2 = ½M{(m/M)u1}2 [by equation 1.]
= ½(u1)2m2/M
KErot of the rod = ½Iω2
KErot = ½ (ML2/12)(6mu1/ML)2
= (3/2) m2(u1)2/M
To be elastic collision KE must be conserved
½m(u1)2 = ½(u1)2m2/M + (3/2) m2(u1)2/M
=> M = 4m
Hence Proved.
Answer: 61
(a) It is given that no external torque and force is applied on the system.
Applying the law of conservation of momentum, we get:
mν=(M+m) ν‘
⇒ν‘=mνM+m
(b) Velocity of the particle w.r.t. centre of mass (COM) C before the collision = vc=v−v‘
⇒vc=v−mvM+m=MvM+v
(c) Velocity of the particle w.r.t. COM C before collision=−MνM+m
(d) Distance of the COM from the particle,
xcm=m1x1+m2x2m1+m2⇒r=M×L2+m×0M+m⇒r=ML2(M+m)
∴ Angular momentum of body about COM
=mvr=m×Mv(M+m)×ML2(M+m)=M2 mvL2(M+m)2
∴ Angular momentum of rod about COM
=M×(mv(M+m))×12mL(M+m)= Mm2vL2 (M+m)2
(e) Moment of inertia about COM = I=I1+I2
I=m[ML2(M+M)]2+ML212+M[ML2(m+M)]2 =mM2L24(m+M)2+ML212+Mm2L24(M+m)2
=3mM2L2+M(m+M)2 L2+3Mm2L212(m+M)2 =M(M+4m)L212(M+m)
(f) About COM,
Vcm=mνM+m∴ Iω=mvr=mv×ML2 (M+m)⇒ ω=mνML2 (M+m)×12 (M+m)M (M+4m)L2 =6mν(M+4m)L
Answer: 62
Let the new angular speed of the rod be ω‘.
Here, net torque on the system is zero.
So, the angular momentum is conserved.
Therefore, we get:
Iω=I‘ω‘
[m(L2)2+m(L2)2]ω=[2m(L2)2+m(L2)2]ω‘
2mL2ω=3mL2ω‘⇒ω‘ =23ω
Answer: 63
(a) Collision will not affect the velocity of ball B because the light rod will exert a force on it only along its length.
Therefore, we have:
Velocity of B = v0
For ball A,
On applying the law of conservation of linear momentum, we get:
mν0=2m×ν
⇒ v=v02
∴ Velocity of A=ν02
(b) If we consider the three bodies to be a system, we have:
Net external force = 0
vCM=m×v0+2m×(v0/2)n+2m =mv0+mv03m =2v03
(Direction will be same as the initial velocity before collision.)
(c) Velocity of (A + P) w.r.t. the centre of mass={2v03−v02}=v06
Velocity of B w.r.t. the centre of mass=v0−2v03=v03
Distance of the (A + P) from the centre of mass =l3
Distance of the B from the centre of mass = 2l3
Applying mvcomr=lcm×ω, we have:(2m×vo6×l3)+(m×v03×2l3)={2m(l3)2+(2l3)2m}×ω⇒6mv0l18=6ml9ω⇒ω=v02l
Answer: 64
(a) Angular momentum=mνr
Let the particle P collides the ball B with a speed u and system moves with speed v just after the collision.
Applying the law of conservation of linear momentum, we get:
mu=2mν−mν=mν
∴u=ν
Velocity, u=2gh√and r=L2
Initial angular momentum of system about COM of rod,
mur=m×2gh√×L2=mLgh√2√
Angular momentum of system about COM of the rod just after the collision =lω
I=2mL24+mL24=3mL24
Applying the law of conservation of angular momentum and obtaining the value of ω, we get:
ω=mLgh√2√3mL24=8gh√3L
(b) When the mass 2m and m are at the top most position and at the lowest point, respectively, they will automatically rotate. In this position, we have:
Total gain in potential energy=2mg(L2)−mg(L2)
Kinetic energy = 12Iω2
Therefore, by the law of conservation of energy, we have:
mgL2=12×34mL2×(8gh9gL2)⇒h=3L2
Answer: 65
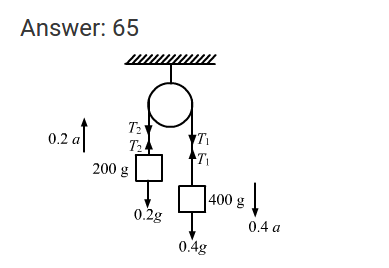
From the free body diagram, we have:
0.4g−T1=0.4a ...(i)T2−0.2g=0.2a ...(ii)(T1−T2) r=lar ...(iii)
On solving the above equations, we get:
a=(0.4−0.2) g(0.4+0.2+1.60.4)=g5
On solving the (b) part of the question first, we have:
Speed of the blocks = v=(2ah)√=2×g5×0.5√=(9.85)√=1.4 m/s
(a) Total kinetic energy of the system
=12m1v2+12m2v2+12Iω2=12m1v2+12m2v2+12I(vr)2=(12×0.4×(1.4)2)+(12×0.2×(1.4)2)+(12×1.6×10−4×(1.42×10−2)2)=(0.2+0.1+0.2)(1.4)2=0.5×1.96=0.98 joule
Answer: 66
Given:
Moment of inertia of the pully = I = 0.2 kg-m2
Radius of the pully = r = 0.2 m
Spring constant of the spring = k = 50 N/m
Mass of the block = m = 1 kg
g = 10 ms2 and h = 0.1 m
On applying the law of conservation of energy, we get:
mgh=12mv2+12kx2+12I(ωr)2
On putting x = h = 0.1 m, we get:
1=12×1×v2+12×0.2×v20.04+12×50×0.01⇒1=0.5v2+2.5v2+14⇒3v2=34 ⇒v2=14⇒v=12=0.5 m/s
Answer: 67
Let the mass of the rod and its angular velocity be m and ω (when hits the ground), respectively.
It is given that the rod has rotational motion only.
.png)
On applying the law of conservation of energy, we get :
12Iω2=mgl2⇒ml23×ω2=mgl⇒ω2=3gl⇒ω= 3gl√= (3×9.81)√⇒ω= 5.42 rad/s
Answer: 68
Let the angular velocity of stick after the collision be ω.
Given:
Mass of the stick = m = 240 g
Mass of the particle = m‘ = 100 g
Length of the string (or rod) = r = l = 1 m
Moment of inertia of the particle about the pivoted end = I‘=m‘r2
⇒I‘=(0.1×12)⇒I‘=0.1 kg−m2
Moment of inertia of the rod about the pivoted end = I=ml23
⇒I=(0.243×12)⇒I=0.08 kg−m2
Applying the law of conservation of energy, we get:
Final energy of the particle = Initial energy of the rod
mgh=12Iω2⇒12Iω2=0.1×10×1⇒ω=20√
For collision, we have:
0.1×12×20√+0=[(0.243)×12+(0.1)2 (1)2] ω⇒ω=20√[10×(0.18)]
⇒0−12Iω2=−m1gl(1−cos θ) −m2g12 (1−cos θ)⇒12 Iω2=−mgl (1−cos θ) −m2g12 (1−cos θ)
⇒12Iω2= 0.1×10 (1−cos θ )−0.24×10×0.5 (1−cos θ)⇒12×0.18×(20324)=2.2×9 (1−cos θ)⇒(1−cos θ)=1(2.2×1.8)
⇒1−cos θ=0.252⇒cos θ=1−0.252=0.748⇒θ=cos−1 (0.748)=41°
Answer: 69
Let the length of the rod be l.
Mass of the rod be m.
Let the angular velocity of the rod be ω when it makes an angle of 37° with the vertical.
.png)
On applying the law of conservation of energy, we get:
12Iω2−0=mgl2(cos37°−cos60°)⇒12×ml2ω23=mgl2(45−12)⇒ω2=9g10l

Let the angular acceleration of the rod be α when it makes an angle of 37° with the vertical.
Using τ=Iα, we get:Iα=mgl2sin37°⇒ml23α=mgl2×35⇒α=0.9(gl)
Force on the particle of mass dm at the tip of the rod
Fc=centrifugal force=(dm)ω2l=(dm)9g10ll⇒Fc=0.9g(dm)Ft=tangential force =(dm)αl⇒Ft=0.9g(dm)
So, total force on the particle of mass dm at the tip of the rod will be the resultant of Fc and Ft.
∴ F=(Fc2+Ft2)√ =0.92√g(dm)
Answer: 70
Let vc be the translational velocity of the cylinder.
Let ω be the rotational velocity of the cylinder.
Let r be the radius of the cylinder.
For rolling, we have:
vc = rω
.png)
Speed of the highest point = vc + rω = 2vc
⇒ 2 × 25 m/s = 50 m/s
Exercise : Solution of Questions on page Number : 200
Answer: 71
Let radius of the sphere be R and its angular speed be ω.
Moment of inertia of sphere, I=25mR2
Total kinetic energy,
K=12Iω2+12mv2K=12×25mR2 ×v2R2+12mv2K=210mv2+12mv2K=2+5mv210=710mv2
Answer: 72
Let the radius of the disc be R.
Let the tension in the string be T.
Let the acceleration of the disc be a.
From the free body diagram, we have:
mg-T=ma …(i)
Torque about the centre of disc,
T×R=I×α
⇒ T×R=12mR2×aR⇒T=12ma … (ii)
Putting this value in equation (i), we get:
mg-12ma=ma⇒mg=32ma⇒a=2g3
Answer: 73
Let r be the radius of the ball.
Let v be the linear speed of the ball when it rolls on the horizontal part of the track.
Let ω be the angular speed of the ball when it rolls on the horizontal part of the track.
Potential energy the ball has gained w.r.t.
the surface will be converted to angular kinetic energy about the centre and linear kinetic energy.
Therefore, we have : mgh=12Iω2+mv2
⇒mgh=12×25mR2×vR2+12mv2⇒gh=15v2+12v2⇒v2=107gh⇒v=10gh7
Answer: 74
Let the radius of the disc be R.
Let the angular velocity of the disc ω.
Let the height attained by the disc be h.
On applying the law of conservation of energy, we get:
12mv2+12Iω2=mgh⇒12mv2+12×12mR2×vR2=mgh⇒12v2+14v2=gh⇒34v2=gh⇒h=3v24g
Answer: 75
Let radius of the sphere be r. Let r be negligible w.r.t. l.
Potential energy of the sphere, P.E. = mglsinθ
Total kinetic energy of the sphere of mass m rolling with speed v = 710mv2
On applying the law of conservation of energy, we get:
mglsinθ=710mv2⇒glsinθ=710ν2⇒ν=107glsinθ
Answer: 76
It is given that a hollow sphere is released from the top of an inclined plane of inclination θ.
(a) To prevent sliding, the body will make only perfect rolling. In this condition, we have:
mgl sin θ-f=ma … (1)
f×R=23 mR2×aR⇒f=23 ma … (2)
On putting this value in the equation (1), we get:
mg sin θ-23 ma=ma
⇒ a=35 g sin θ
From equation (1), we have:
mg sin θ-f=35 mg sin θ⇒ f=25 mg sin θ⇒ μmg cos θ=25 mg sinθ⇒ μ=25 tan θ
(b)
15 tan θ mg cos θ R=23 mR2α ⇒ α=310 g sin θR
ac=g sin θ-g5 sin θ=45 g sin θ⇒t2=2lac= 2l 4gsin θ5 52g sin θ
∴ ω=at K.E.=12 mν2+12 Iω2=12 m 2al+12 l a2t2=12 m 4g sin θ5×2×l+12×23 mR2×9100=sin2 θR×5L2g sin θ=4 mgl sin θ5+3 mgl sin θ40=78 mgl sin θ
Answer: 77
The radius of the solid sphere (r) is negligible w.r.t. the radius of the hemispherical cup (R).
Let the ball reaches the bottom of the cup with a velocity v and angular velocity ω.
On applying the law of conservation of energy, we get:
mgR=12Iω2+12mv2
⇒mgR=12×25 mν2+12 mν2⇒710 mν2=mgR⇒ν2=107gR
As shown in the free body diagram, we have:
Total normal force on the ball
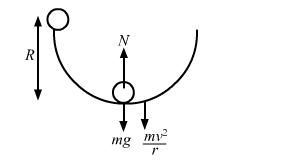
=mg+mν2R
=mg+m107gRR=mg+mg 107=177mg
Answer: 78
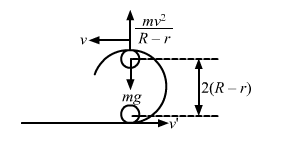
Let the sphere be thrown with velocity v’ and its velocity becomes v at the top-most point.
From the free body diagram of the sphere, at the topmost point, we have:
mv2R-r=mg⇒v2=gR-r
On applying the law of conservation of energy, we have :
12mν’2+12Iω’2=2mgR-r+12mν2+12Iω2⇒710mν’2=2mgR-r+710mν2⇒710mν’2=2mgR-r+710mg(R-r)⇒710ν’2=27gR-r10⇒ν’=277 gR-r
Answer: 79
(a) Let the velocity and angular velocity of the ball at point A be v and ω, respectively.
Total kinetic energy at point A =12mv2+12Iω2
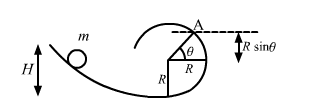
Total potential energy at point A=mgR+Rsinθ
On applying the law of conservation of energy, we have:
Total energy at initial point = Total energy at A
Therefore, we get:
mgH=12mv2+12Iω2+mgR1+sinθ⇒mgH-mgR1+sinθ=12mν2+12Iω2⇒12mv2+12Iω2=mgH-R-Rsinθ …1
Total K.E. at A=mgH-R-Rsinθ
(b) Let us now find the acceleration components.
Putting I=25mR2 and ω=vR in equation (1),
we get:
710mv2=mgH-R-Rsinθ⇒v2=107gH-R-Rsinθ …2
Radial acceleration,
ar=v2R=107gH-R-RsinθR
For tangential acceleration,
Differentiating equation 2 w.r.t. ‘t’ ,2vdvdt=-107gRcosθdθdt⇒ωRdvdt=-57 gRcosθdθdt⇒dvdt=-57 gcosθ⇒at=-57 gcosθ
(c) At θ=0, from the free body diagram, we have:
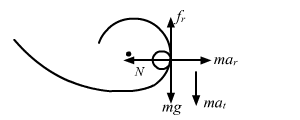
Normal force = N=mar
N=m×107gH-R-RsinθR =701000×107×10 0.6-0.10.1 = 5 N
At θ=0, from the free body diagram, we get:
fr=mg-mat (fr = Force of friction)
⇒fr=mg-at=m10-57×10=0.0710-57×10 =1100 70-50=0.2 N
Answer: 80
If the shell does not slip on the surface, its motion should be pure rolling.
Let the cue hits at a height ‘h‘ above the centre.
Let the centre of shell moves with velocity vc and shell rotates with angular velocity ω after hitting.
For pure rolling, vc=Rω
On applying the law of conservation of angular momentum at point O, we get:
mvch=Iωmvch=23mR2 vcRh=2R3
Answer: 81
Initial angular momentum,
L=Iω =12mR2ω
Angular momentum after it starts pure rolling,
L’=Iω’+mv×R=12mR2vR+mvR =32mVR
As no external torque is applied, angular momentum will be conserved.
Therefore, we have:
L = L’
⇒12mR2ω=32mvR⇒v=ωR3
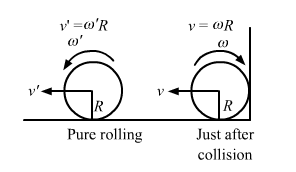
Answer: 82
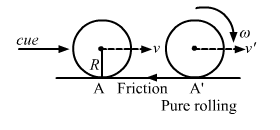
Initial angular momentum about point A,
L=mvR
Angular momentum about point A’ after it starts pure rolling,
L’=Iω+mv×R =23mR2v’R+mv’R =53mv’R
As no external torque is applied, angular momentum will be conserved.
Therefore, we have:
L = L‘
⇒mvR=53mv’R⇒v’=3v5
Answer: 83
Let M be the mass of the hollow sphere and α be the angular acceleration produced in the sphere by the tangential force F.
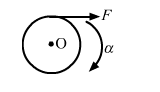
Torque due to this force, τ=F×R
Also, τ=Iα
So, F×R=23MR2α⇒α=3F2MR
Applying θ=ω0t+12αt2, we get:
2π=12αt2⇒t2=8πMR3F
Let d be the distance travelled in this time t.
Acceleration, a=FM
∴ d=12at2 = 12×FM×8πMR3F =4πR3
Answer: 84
Let α be the angular acceleration produced in the sphere.
Rotational equation of motion,
F×R-fr×R=Iα
⇒F=25mRα+μmg … (1)
Translational equation of motion,
F=ma-μmg⇒a=F+μmgm
For pure rolling, we have:
α=aR
⇒α=F+μmgmR
Putting the value of α in equation (1), we get:
F=25mRF+μmgmR+μmg⇒F=25F+μmg μmg⇒F=25F+25×27×0.5×10+27×0.5×10⇒3F5=47+107=2⇒F=5×23=103=3.3 N
Answer: 85
Initial angular momentum about point A,
L=mv×R-Iω =mvR-25mR2vR =35mvR
Angular momentum about point A’ after it stops rotating,
L’=mv’R
As no external torque is applied, angular momentum will be conserved.
Therefore, we have:
L = L’
⇒mvR=53mv’R⇒v’=3v5
Angular momentum about point A after it stops rotating,
L’=mv’R
Angular momentum about point A’ after it starts pure rolling.
L”=Iω”+mv”×R =25mR2v”R+mv”R =75mVR
As no external torque is applied, angular momentum will be conserved.
Therefore, we have:
L’ = L”
⇒m3V5R=75mv”R⇒v”=3v7
Answer: 86
Consider two cases:
(a) Just after the collision with the wall, the sphere rebounds with velocity ν towards left but it continues to rotate in the clockwise direction (as shown in figure)
Angular momentum of the sphere about centre,
L=mvR-Iω =mvR-25mR2×νR =35mvR
(b) When pure rolling starts:
Let the velocity be ν’ and the corresponding angular velocity be v’R.
L’=mv’R+Iω’ =mv’R+25mR2×v’R =75mv’R
Angular momentum is constant.
Therefore, we have:
L=L’⇒v’=3v7
So, the sphere will move with velocity 3v7.